See How Robots Evolve Over 1,000 Generations
This article is more than 2 years old
 When most people think of robots evolving, they think of them learning and adapting to new situations. That’s definitely part of the equation, but chances are those folks are forgetting one key aspect: mating. It might seem crazy, given that reproduction is something automatons haven’t mastered just yet, but they can theoretically mate. It’s probably not as much fun as the real thing, but robots can make decisions that would affect their mating strategies, if they were indeed able to physically reproduce. Scientists studied this kind of evolution and found that the subjects in question didn’t evolve to embrace one specific strategy for propagation, they actually devised two.
When most people think of robots evolving, they think of them learning and adapting to new situations. That’s definitely part of the equation, but chances are those folks are forgetting one key aspect: mating. It might seem crazy, given that reproduction is something automatons haven’t mastered just yet, but they can theoretically mate. It’s probably not as much fun as the real thing, but robots can make decisions that would affect their mating strategies, if they were indeed able to physically reproduce. Scientists studied this kind of evolution and found that the subjects in question didn’t evolve to embrace one specific strategy for propagation, they actually devised two.
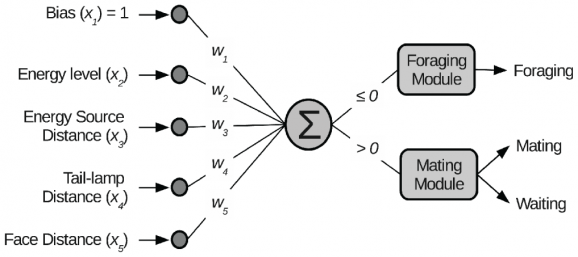
Researchers from the Okinawa Institute of Science and Technology put four small, two-wheeled robots equipped with cameras and infrared ports for “mating” in a small area with between 4-16 batteries representing food sources. They programmed the droids to decide what to do based on their energy levels, the location of the nearest battery, and the location of the nearest robot. They then decided whether it wanted to look for “food,” or pursue another for mating, or wait for someone else to come to them. Then the researcher left the subjects on their own, hoping that the results would shed light on polymorphism, or different forms within a single species. Polymorphism results from evolution like other traits, and the aspect these researchers were particularly interested in is the development of mating strategies among a single population.
 When the robots mated, interfacing face-to-face, they produced offspring (the more energy the robots had, the more offspring they produced). Each robot was a hermaphrodite, so any one could couple with any other. At first, the researchers ran the experiment on the four physical robots, but then they performed more experiments via a computer program, as it’s pretty tough to get results from 1,000 generations of physical robots.
When the robots mated, interfacing face-to-face, they produced offspring (the more energy the robots had, the more offspring they produced). Each robot was a hermaphrodite, so any one could couple with any other. At first, the researchers ran the experiment on the four physical robots, but then they performed more experiments via a computer program, as it’s pretty tough to get results from 1,000 generations of physical robots.
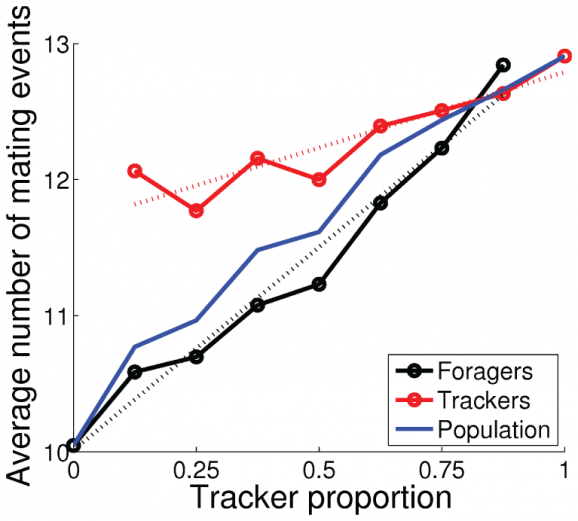 After running simulations for 1,000 generations, the researchers found that the resulting population of robots was diverse. They divide them into two groups: the foragers and the trackers. Foragers prioritize energy sources, always choosing food above all else. The trackers spend more time identifying and locating possible mates, provided that its energy source wasn’t too low. The fittest populations demonstrated a 3:1 ratio of trackers to foragers, and one of those populations broke down into smaller groups of trackers, some of them having a stronger drive to initiate mating, while others preferred to wait. Ultimately, the researchers concluded that the polymorphic evolution demonstrated by the robots was “stable,” which is the first time anyone has use robot evolution to demonstrate this evolutionary trend often seen in nature.
After running simulations for 1,000 generations, the researchers found that the resulting population of robots was diverse. They divide them into two groups: the foragers and the trackers. Foragers prioritize energy sources, always choosing food above all else. The trackers spend more time identifying and locating possible mates, provided that its energy source wasn’t too low. The fittest populations demonstrated a 3:1 ratio of trackers to foragers, and one of those populations broke down into smaller groups of trackers, some of them having a stronger drive to initiate mating, while others preferred to wait. Ultimately, the researchers concluded that the polymorphic evolution demonstrated by the robots was “stable,” which is the first time anyone has use robot evolution to demonstrate this evolutionary trend often seen in nature.
Well, I guess we know the evolutionary fate of hermaphroditic, autonomous robots, that is, presuming they’re more interested in energy sources and reproducing than they are messing with us.